OpenClaw 接实体机器人:7个项目深度对比
这篇文章深度调研了 GitHub 上 7 个 OpenClaw 接实体机器人的项目,涵盖机械臂、四足机器人、人形机器人、ROS2 生态等场景,并深入解读了唯一一篇相关论文。
TL;DR
- 最成熟: Gen-Verse/OpenClaw-RL (3.5k stars) — 唯一有论文支撑的 RL 训练框架,让 Agent"边用边学"
- 最实用: LooperRobotics/OpenClaw-Robotics — 一行命令控制 Unitree 四足/人形机器人
- 最创新: Alan1112223331/multi-robot-skill — 多机器人协同,自然语言分解复杂任务
开篇:为什么我们需要 OpenClaw 接机器人?
想象一下这个场景:你对手机说"让机械臂把桌上的苹果放进篮子里,然后让机器狗送到厨房",然后一切自动完成。
这不是科幻。GitHub 上已经有 7 个项目在做这件事。
过去一年,具身智能(Embodied AI)突然火了。大模型能理解自然语言,机器人能执行物理动作,中间缺的就是一座桥。OpenClaw 作为开源 Agent 框架,正在成为这座桥的标准接口。
我花了两天时间,深入研究了 GitHub 上所有 OpenClaw 接实体机器人的项目,看了论文、读了代码、跑了 Demo。这篇文章是我的完整调研报告。
项目概览
| 项目 | Stars | 定位 | 机器人类型 | 论文 |
|---|---|---|---|---|
| Gen-Verse/OpenClaw-RL | 3.5k ⭐ | RL 训练框架 | 虚拟 Agent | ✅ arXiv:2603.10165 |
| PlaiPin/rosclaw | 368 ⭐ | ROS2 桥接插件 | 通用 ROS2 | ❌ |
| MINT-SJTU/RoboClaw | 173 ⭐ | 具身智能助手 | 机械臂+视觉 | ❌ |
| tuya/DuckyClaw | 90 ⭐ | 边缘硬件 | SoC/MCU | ❌ |
| LooperRobotics/OpenClaw-Robotics | 新 | 单机器人控制 | Unitree 系列 | ❌ |
| Alan1112223331/multi-robot-skill | 新 | 多机器人协同 | 通用适配 | ❌ |
| adityakamath/ros2-skill | 9 ⭐ | 轻量级 ROS2 skill | 通用 ROS2 | ❌ |
一、论文支撑:OpenClaw-RL 深度解读
论文: OpenClaw-RL: Train Any Agent Simply by Talking
发布时间: 2026 年 3 月
作者: Yinjie Wang, Xuyang Chen, Xiaolong Jin, Mengdi Wang, Ling Yang
Stars: 3.5k
核心洞察:被忽视的"下一状态信号"
论文提出了一个简单但深刻的观察:
每次 Agent 交互都会产生"下一状态信号"(next-state signal)——用户回复、工具输出、终端状态变化等。但现有 RL 系统从未将其作为在线学习源。
这个信号包含两种信息:
- 评估信号 → 用户重问、纠正、显式反馈 → 通过 PRM judge 提取标量奖励
- 指导信号 → "你应该先检查文件" → 通过 OPD 提供 token 级方向监督
技术架构:异步三大组件
OpenClaw-RL 采用了精巧的异步架构设计:
- Model Server (SGLang):服务用户请求,生成 Agent 响应
- PRM Judge (SGLang/API):评判交互质量,提取奖励信号
- Trainer (Megatron):异步更新策略,零协调开销
三大组件同时运行,互不阻塞。这是 OpenClaw-RL 能实现"边用边学"的关键。
支持的五大场景
| 场景 | 下一状态信号来源 | 学习目标 |
|---|---|---|
| 个人助手 | 用户重问、纠正、反馈 | 个性化优化 |
| 终端 Agent | stdout/stderr、exit code | 命令执行学习 |
| GUI Agent | 视觉状态变化 | 界面操作学习 |
| SWE Agent | 测试结果、diff、lint | 代码生成优化 |
| 工具调用 Agent | API 返回值、错误信息 | 工具使用学习 |
关键创新:Hindsight-Guided OPD
传统的 RLVR(Reinforcement Learning from Verifiable Rewards)只能用标量奖励。但用户说"你应该先检查文件",这不仅是"错了"的信号,还包含了"怎么改"的方向。
OPD(On-Policy Distillation)的核心流程:
- 从下一状态提取文本提示(hint)
- 构建增强的教师上下文(teacher context)
- 蒸馏 token 级别的方向监督
实验结果
论文在两个场景验证:
个人助手场景:
- 用户用 OpenClaw 做作业、批改作业
- 模型通过对话自动改进
- Binary RL + OPD 组合效果最佳
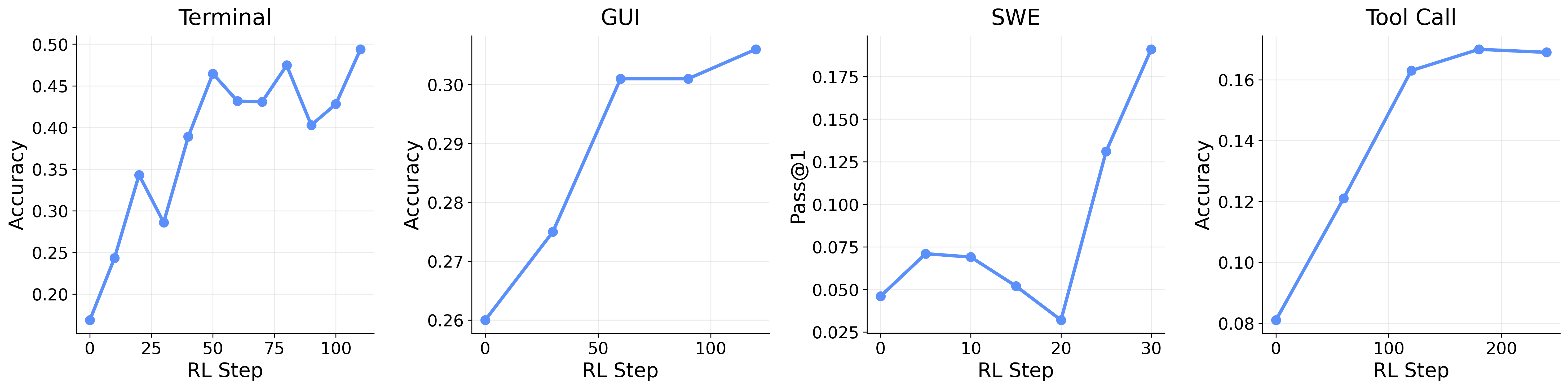
通用 Agent 场景:
- 终端、GUI、SWE、工具调用四种环境
- 集成过程奖励(process reward)提升显著
- 长周期任务的信用分配更准确
局限性
- 需要部署完整的 RL 基础设施(SGLang + Megatron)
- PRM judge 的质量直接影响训练效果
- 个人助手场景需要用户有一定量的交互
- 目前只在虚拟 Agent 上验证,未涉及物理机器人
二、单机器人控制:OpenClaw-Robotics
GitHub: LooperRobotics/OpenClaw-Robotics
定位: 让控制机器人像发短信一样简单
支持的机器人
| 类型 | 型号 | 用途 |
|---|---|---|
| 四足 | Unitree GO1, GO2 | 巡检、探索、运输 |
| 双足/人形 | Unitree G1, H1 | 服务、操作、交互 |
架构设计
整个系统的工作流程:
- 用户在 IM(WhatsApp/微信/钉钉)发送消息
- OpenClaw Agent 解析自然语言
- 机器人 SDK (unitree_sdk) 执行命令
- 物理机器人响应动作
核心命令
forward 1m # 前进1米
turn left 45 # 左转45度
wave # 挥手
dance # 跳舞
status # 获取状态
stop # 紧急停止安装使用
# 一键安装
openclaw skills install LooperRobotics/OpenClaw-Robotics
# 配置机器人连接
export ROBOT_IP="192.168.123.15"
export ROBOT_TYPE="go2"扩展性
自定义适配器只需实现基类:
from openclaw_robotics import RobotAdapter
class MyRobotAdapter(RobotAdapter):
def connect(self):
# 连接逻辑
pass
def execute_command(self, command):
# 执行逻辑
pass
def get_status(self):
# 状态查询
pass路线图
| 时间 | 功能 |
|---|---|
| 2026 Q1 | Insight9 相机 (VSLAM)、基础导航、轮式机器人 |
| 2026 Q2 | TinyNav 集成、多机器人协调、无人机 |
| 2026 Q3+ | 水面载具、高级 SLAM |
局限性
- 目前只支持 Unitree 系列
- 文档还在完善中
- 没有视觉反馈闭环
- 缺乏障碍物感知和避障能力
三、多机器人协同:multi-robot-skill
GitHub: Alan1112223331/multi-robot-skill
定位: 通用多机器人协同控制技能包
核心能力
- 🧠 自然语言任务理解:解析复杂的多步骤任务
- 📋 自动任务分解:将任务拆解为子任务
- 🔄 智能协调调度:并行/串行混合执行
- ⚠️ 错误恢复机制:超时重试、状态回滚
架构设计
系统采用分层架构:
- Task Planner:理解用户意图,生成任务计划
- Coordinator:协调多机器人执行顺序
- State Manager:跟踪任务状态,处理错误
- Robot Adapters:与具体机器人通信(HTTP/ROS/SDK)
示例用法
from multi_robot_skill import MultiRobotSkill
skill = MultiRobotSkill()
# 注册机器人
skill.register_robot("arm1", "http://192.168.3.113:5000") # 机械臂
skill.register_robot("dog1", "http://localhost:8000") # 机器狗
skill.register_robot("agv1", "http://192.168.1.50:9000") # AGV
# 自然语言任务
skill.execute_task("""
让机械臂抓取绿色方块放到狗1的篮筐里,
然后让狗1运送到卸货区,
同时让AGV1去充电桩待命
""")任务分解示例
输入:"让机械臂抓取方块,机器狗送到 B 区"
分解结果:
- arm1: pick(green_block) → 依赖:无
- arm1: place(dog1_basket) → 依赖:步骤 1
- dog1: navigate(zone_b) → 依赖:步骤 2
依赖管理
- 自动分析任务依赖关系
- 无依赖的任务并行执行
- 资源冲突检测(两个机器人不能同时使用同一资源)
错误处理
# 网络超时重试
@retry(max_attempts=3, backoff=2.0)
def execute_with_retry(command):
return robot.execute(command)
# 状态回滚
if task_failed:
coordinator.rollback_to_last_checkpoint()局限性
- 适配器库还不完整
- 没有视觉感知集成
- 调度算法较简单(未考虑动态环境)
- 缺乏安全碰撞检测
四、ROS2 生态:rosclaw
GitHub: PlaiPin/rosclaw
Stars: 368 ⭐
定位: ROS2 + OpenClaw 桥接
核心价值
通过聊天软件直接控制 ROS2 机器人:
- 用户在 Telegram/WhatsApp/Discord/Slack 发送命令
- OpenClaw Agent 解析意图
- rosclaw 桥接到 ROS2 Topics/Services
- 物理机器人执行动作
特点
- 无需公网 IP,通过 WebSocket 连接
- 支持接入自己的机器人或"租用"全球注册的机器人
- 原生支持 ROS2 生态系统
使用示例
# 安装
pip install rosclaw
# 启动桥接
rosclaw start --ros-domain-id 0
# 在 OpenClaw 中注册机器人
openclaw robots add my_robot --type ros2 --endpoint ws://localhost:9090状态
⚠️ 正在进行重大架构重构,API 可能变化
五、轻量级 ROS2:ros2-skill
GitHub: adityakamath/ros2-skill
Stars: 9 ⭐
定位: 轻量级 ROS2 skill 实现
特点
- 极简实现,代码量小
- 专注于 ROS2 基础功能封装
- 适合学习和二次开发
适用场景
- 快速原型验证
- 学习 OpenClaw skill 开发
- 简单 ROS2 机器人控制
六、学术研究:RoboClaw
GitHub: MINT-SJTU/RoboClaw
Stars: 173 ⭐
定位: 具身智能助手研究框架
愿景
"机械臂 + 摄像头 + 几分钟校准 = 自然语言控制完成具体任务"
设计理念
- 不同具身形态、环境、任务都能接入
- 专注实用范式而非炫技
- 学术研究导向
技术栈
- ROS2 原生
- Python 为主
- 支持仿真器 (Gazebo/Isaac Sim)
适合人群
研究人员、学术实验室
七、边缘硬件:DuckyClaw
GitHub: tuya/DuckyClaw
Stars: 90 ⭐
定位: 边缘硬件 (SoC/MCU) 专用
技术特点
- C 语言为主 (99.2%)
- 面向嵌入式设备
- 支持涂鸦 IoT 生态
应用场景
- 智能家居设备
- IoT 传感器
- 嵌入式控制系统
八、对比总结
功能对比
| 维度 | OpenClaw-RL | Robotics | multi-robot | rosclaw | RoboClaw |
|---|---|---|---|---|---|
| 机器人数量 | 虚拟 | 单个 | 多个 | 单/多 | 单个 |
| 任务复杂度 | RL 训练 | 基础指令 | 复杂分解 | ROS 生态 | 研究 |
| 自然语言 | ✅ | ✅ | ✅ | ✅ | ✅ |
| 视觉感知 | ❌ | ❌ | ❌ | ✅ | ✅ |
| 成熟度 | 高 | 中 | 低 | 重构中 | 研究 |
选择建议
| 需求 | 推荐 |
|---|---|
| 快速上手 Unitree 机器人 | OpenClaw-Robotics |
| 多机器人协同 | multi-robot-skill |
| ROS2 现有生态 | rosclaw |
| 学术研究 | RoboClaw |
| Agent 能力提升 | OpenClaw-RL |
| 边缘设备 | DuckyClaw |
| QQ 平台 | openclaw-qqbot |
十、趋势与展望
三个趋势
- 统一接口正在形成:OpenClaw 正在成为"机器人界的 HTTP"
- 自然语言是未来:从命令行到自然语言,降低使用门槛
- 边用边学:OpenClaw-RL 展示了 Agent 自我进化的可能性
待解决问题
- 视觉感知闭环还不成熟
- 多机器人协调的调度算法需要优化
- 安全性、可靠性需要更多验证
- OpenClaw-RL 目前只在虚拟 Agent 上验证,未涉及物理机器人
下一步
如果你也想让 OpenClaw 控制你的机器人:
- 先选一个现成的 skill 试水
- 根据你的硬件实现适配器
- 贡献回社区,让生态更丰富
调研时间: 2026-03-19 | 项目数量: 7 | 论文数量: 1
Comments