FMCW Radar Multi-Target Range, Speed, and Angle Measurement: From 1D FFT to 3D Positioning with MATLAB Simulation
In a Signals and Systems course, we built a complete FMCW (Frequency Modulated Continuous Wave) radar system simulation from scratch in MATLAB, achieving range, speed, and angle measurement for multiple moving targets—progressing from single-target to multi-target, from 1D FFT to 3D positioning, systematically tackling the core challenges of real-world radar signal processing.
1. What Is FMCW Radar?
FMCW (Frequency Modulated Continuous Wave) radar is the mainstream solution for today's automotive millimeter-wave radar. Unlike traditional pulse radar, it continuously transmits a signal with linearly varying frequency, and acquires target information by measuring the frequency difference between the reflected and transmitted signals after mixing.
This technology is widely deployed in autonomous driving (ACC adaptive cruise control, AEB automatic emergency braking), traffic monitoring, and drone obstacle avoidance. The 77GHz millimeter-wave FMCW radar has become a standard sensor for L2+ autonomous driving. This project builds a simulation system from scratch in MATLAB to understand the underlying signal processing principles.
2. Progressive Layers: From Single Target to 3D Positioning
Stage 1: Single-Target Ranging
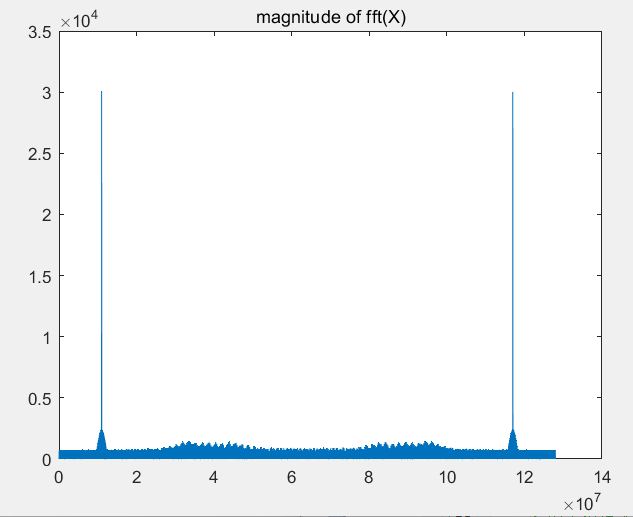
Transmit linear chirp → Receive echo → Mix to obtain IF signal → FFT to extract frequency peak → Convert to range. This addresses the radar's most fundamental question: "how far?"
Stage 2: Single-Target Ranging + Speed Measurement
Radial velocity is calculated from the phase difference across multiple chirps. We compared three velocity estimation algorithms—Average Phase Difference, Doppler Shift, and Unwrapped Phase—with the unwrapped phase method achieving the highest accuracy (error < 0.3%).
Stage 3: Multi-Target Ranging + Speed Measurement
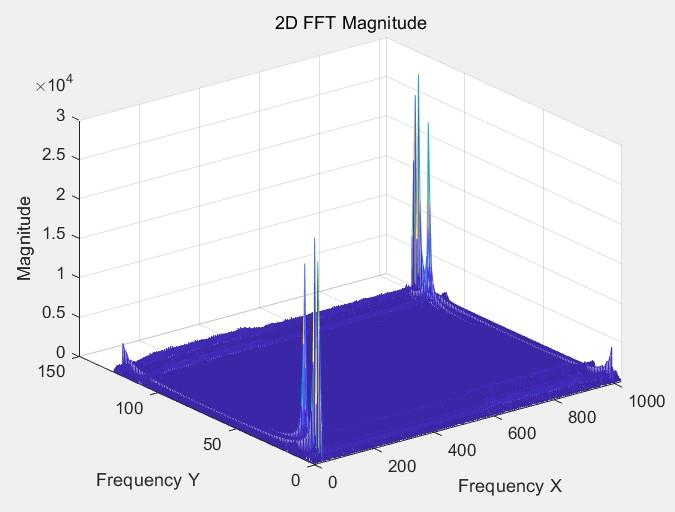
With multiple targets, the spectrum contains multiple peaks; findpeaks replaces max for multi-peak detection. However, when two targets share the same range, 1D FFT cannot separate them—this motivates the necessity of 2D-FFT: separating range-identical targets along the velocity dimension.
Stage 4: 3D Positioning (Range + Speed + Angle)
Extended to a 16-antenna array, simultaneously resolving range, speed, and angle via 3D-FFT. The phase difference between antennas maps to the target's direction of arrival—this is the core method enabling 2D spatial positioning in automotive radar.
3. Key Results
| Metric | Set Value | Measured Value | Error |
|---|---|---|---|
| Target 1 Range | 30m | 30.01m | 0.03% |
| Target 2 Range | 40m | 40.02m | 0.05% |
| Target 3 Range | 60m | 60.09m | 0.15% |
| Target 1 Speed | 5m/s | 5.02m/s | 0.32% |
| Target 2 Speed | 10m/s | 10.02m/s | 0.18% |
| Target 3 Speed | 33m/s | 32.96m/s | 0.12% |
Simulation parameters: carrier frequency 77GHz, bandwidth 150MHz, chirp period 8μs. Range measurement span 0~1023m, resolution approximately 1m; speed range ±121m/s, resolution approximately 1.9m/s—meeting the performance levels of typical automotive radar.
4. Technical Challenges and Solutions
- Phase Wrapping: Direct phase calculation experiences discontinuities at ±π, unusable for velocity estimation →
unwrapto obtain a continuous phase sequence - Same-Range Multi-Target Separation: 1D FFT cannot distinguish targets at the same range → Introduce 2D-FFT to achieve separation along the velocity dimension
- Angle Measurement Accuracy: Two-antenna configuration has low resolution → Extend to 16-antenna array with 3D-FFT for high-precision angle measurement
5. Summary
Starting from the fundamental principles of FFT, we progressively built a complete FMCW radar signal processing chain—single-target ranging → Doppler speed measurement → multi-target 2D-FFT separation → 16-antenna 3D-FFT 3D positioning. The project deepened understanding of core concepts such as Fourier transform, sampling theorem, and phase analysis, while also laying the foundation for the underlying principles of autonomous driving perception systems.
MATLAB simulation implementation; code is reproducible and parameters are adjustable.
Comments